



自動化改造和機器人應用的多功能機械手
2015-12-21 來源:電子基礎 作者:滕今朝
近年來我國人力成本的不斷提高,用工荒越來越嚴重,制造業的生存和發展遇到不小的困難。發展智能制造技術,尤其是工業機器人技術,顯得更加重要。2014 年中國新增機器人 5.6 萬臺,成為世界上最大的機器人。
作為電子愛好者,制作低成本的多功能機械手,不僅能夠培養自己的專業興趣,提高自己的專業知識,而且為迎接今后的自動化改造和機器人應用浪潮早做準備。
基于上述背景,本文介紹了“低成本多功能機械手”的制作方法,用百元成本,實現了機械手的 “繪圖” 、 “搬運” 、“激光雕刻”功能,適合電子愛好者進行學習。

功能介紹
■ 1. 繪圖功能
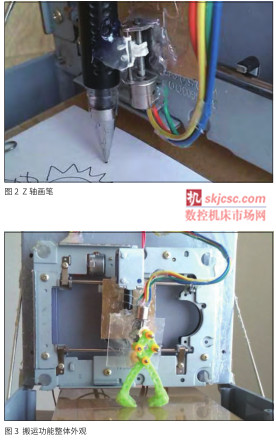
應用范疇:三維立體繪圖、銑加工等。繪圖功能的整體外觀如圖 1 所示。用舊的電腦光驅進行改造,作為該項目的 X、Y 軸,另用一個微型步進電動機作為 Z 軸,使其實現空間移動。畫筆固定在 Z 軸電機滑塊上。如圖 2 所作者 / 滕今朝低成本多功能機械手 DIY
■ 2. 搬運功能
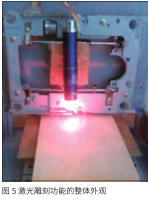
應用范疇:搬運、裝配、倉儲等。搬運功能的整體外觀如圖 3 所示。電磁鐵、機械爪及電機如圖 4 所示。

機械爪的固定軸安裝在托盤上,同時作為機械爪的杠桿支點。機械爪的運動軸安裝在開合電機的滑塊上。滑塊上下運動帶動機械爪閉合、張開。開合電機固定在托盤上。托盤可以被電磁鐵帶動,整體上下運動。
■ 3. 激光雕刻
應用范疇:激光雕刻、電火花加工、線切割加工等。搬運功能的整體外觀如圖 5 所示。具體方案
■ 1. 電路部分
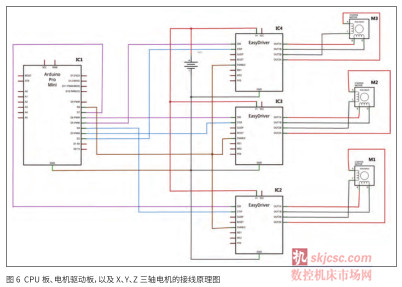
我們采用運行grbl 固件的單片機,arduino pro atmega328p 最小系統。CPU 板和下載板的價格很便宜,都是十幾元。選用以 A3967 為核心的電機驅動板。CPU 板、電機驅動板,以及 X、Y、Z 三軸電機的接線原理圖,如圖 6 所示。
■ 2. 硬件搭建
將兩塊舊的電腦光驅分別固定在兩個塑料外殼上,并垂直安裝,并用金屬桿加固。如圖 1 所示。利用光驅的步進電機作為該項目的 X、Y 軸。根據需要,安裝 Z 軸微型步進電動機、電磁鐵、機械爪、激光筆。電路板安裝在塑料外殼背面。
■ 3 . 軟件使用
用 Arduino Builder 軟件將 grbl 固件下載到 arduino pro atmega328p。軟件的具體使用方法,很簡單,網上有詳細介紹,這里就不多說了。
用 ArtCAM 軟件來設計運動路徑,并進行保存。如圖 7所示。grbl controller 上位機軟件與嵌入了grbl 軟件的arduino 單片機系統通信,解析數控代碼。通 過 grbl controller 打開已經保存好的刀路文件,并實時與單片機通訊和監控。如圖 8 所示。

投稿箱:
如果您有機床行業、企業相關新聞稿件發表,或進行資訊合作,歡迎聯系本網編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機床行業、企業相關新聞稿件發表,或進行資訊合作,歡迎聯系本網編輯部, 郵箱:skjcsc@vip.sina.com
更多相關信息

