
基于工業(yè)機器人的數(shù)控加工控制系統(tǒng)設計
2021-6-1 來源:天津職業(yè)技術師范 作者:龐黨鋒 宋亞杰 王春光 劉彥磊 李傳軍
摘要: 通過研究制造生產(chǎn)線數(shù)控加工單元和上下料系統(tǒng),并分析數(shù)控機床和工業(yè)機器人工作原理和生產(chǎn)流程,設計一種基于 Modbus/TCP 協(xié)議的數(shù)控機床加工單元控制系統(tǒng)。該系統(tǒng)采用 S7-1200 PLC 作為主站,通過以太網(wǎng)通信實現(xiàn)對工業(yè)機器人和數(shù)控機床協(xié)同控制。通過實際工程驗證,該系統(tǒng)具有通信穩(wěn)定、響應速度快和工作效率高等特點。
關鍵詞: 數(shù)控機床; 智能制造; Modbus/TCP; 工業(yè)機器人
0 前言
隨著中國制造 2025 戰(zhàn)略的提出,提高裝備制造智能化水平已經(jīng)成為制造業(yè)發(fā)展的趨勢,加工制造單元是智能制造的主要環(huán)節(jié),其智能化程度對企業(yè)生產(chǎn)效率具有重要影響。為提高數(shù)控加工的智能化和信息化水平,設計基于 Modbus/TCP 協(xié)議的工業(yè)機器人自動上下料系統(tǒng),將數(shù)控機床、工業(yè)機器人、數(shù)據(jù)信息采集管控等加工制造設備集成為智能制造系統(tǒng)。通過工程驗證,系統(tǒng)通信穩(wěn)定、工作效率高,該系統(tǒng)在加工制造環(huán)節(jié)的應用對提高制造企業(yè)的智能制造水平具有重要意義。
1 、系統(tǒng)硬件結構設計
基于工業(yè)機器人的數(shù)控加工控制系統(tǒng)采用西門子S7-1200 系列 PLC 作為系統(tǒng)的中央控制器,型號為CPU1214C,PLC 集成 PROFINET 接口用于編程以及設備間通信,支持開放的以太網(wǎng)協(xié)議與第三方設備通信,通過工業(yè)交換機實現(xiàn)與機器人、數(shù)控機床等設備通信。
計算機用于控制器 S7-1200 PLC 的編程和工業(yè)機器人的編程調(diào)試,通過工業(yè)交換機將程序下載到 PLC 和工業(yè)機器人控制器,系統(tǒng)硬件結構如圖 1所示,系統(tǒng)網(wǎng)絡拓撲如圖 2 所示。
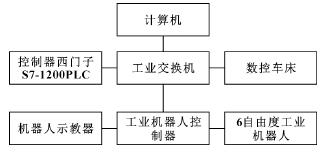
圖 1 統(tǒng)硬件結構
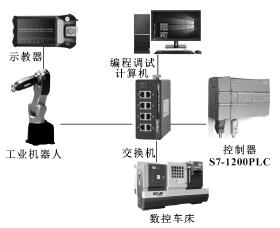
圖 2 系統(tǒng)網(wǎng)絡拓撲圖
2 、系統(tǒng)網(wǎng)絡通信設計
Modbus / TCP 是運行在 TCP / IP 上的 Modbus 報文傳輸協(xié)議,通過此協(xié)議,控制器相互之間通過網(wǎng)絡和其他設備進行通信。控制器 S7-1200 PLC 與工業(yè)機器人李群 QKM 間采用 Modbus/TCP 通信協(xié)議,Modb-us / TCP 協(xié)議是標準的網(wǎng)絡通信協(xié)議,利用控制器上的 PN 接口與工業(yè)機器人進行通信。
2. 1 控制器 PLC Modbus / TCP 協(xié)議
在 S7-1200 PLC 編程軟件 TIA Portal V15 中調(diào)用Modbus / TCP 的 庫 指 令 “MB _ CLIENT ” 和 “MB _SERVER”, “MB _ SERVER” 指令作為 Modbus / TCP服務器通過控制器 S7-1200PLC 的 PROFINET 連接通信,使用該指令,無需其他任何硬件模塊。S7-1200PLC Modbus / TCP 通信程序如圖 3 所示, “MB_SERV-ER” 指令將處理 Modbus / TCP 客戶端的連接請求、接收 Modbus 功能的請求并發(fā)送響應; 通過 “MB_CLIENT” 指令,在客戶端和服務器之間建立連接、發(fā)送請求、接收響應并控制Modbus//TCP 服務器連接終端。
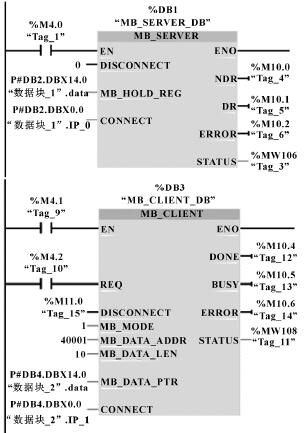
圖 3 S7-1200 PLC Modbus/TCP 通信程序
2. 2 控制器 PLC 與機器人通信
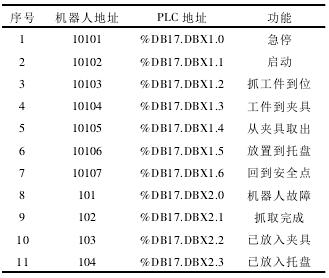
S7-1200 PLC 為系統(tǒng)的主控制器,用來接收上位機控制信息并進行分析,然后將控制指令發(fā)送給執(zhí)行設備。控制器 S7-1200 PLC 與數(shù)控機床的通信通過硬件 I/O 方式來實現(xiàn)機床上下料數(shù)據(jù)交互。為提高信號抗干擾能力,在 PLC 信號輸出端增加光電隔離模塊。機器人與 PLC 數(shù)據(jù)交互的主要地址分配如表 1所示。
表 1 機器人與 PLC 數(shù)據(jù)交互主要地址分配
機器人與控制器 PLC 交互的目的主要是接收PLC 發(fā)來的動作控制命令,執(zhí)行相應示教動作任務,并將自身運行狀態(tài)信息返回至 PLC,保證整個系統(tǒng)正常運行,控制流程如圖 4 所示。
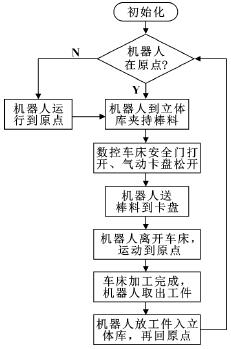
圖 4 系統(tǒng)控制流程
工業(yè)機器人反饋給主控制器 PLC 的信息主要包括對各指令的響應和系統(tǒng)狀態(tài)信息的反饋,同時還包括機器人自身的運行狀態(tài),如空間坐標、工作模式等信息。
2. 3 機器人與數(shù)控機床通信
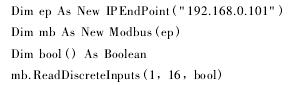
采用李群自動化六軸工業(yè)機器人,型號為 QKMHL6; 數(shù)控機床安全門、夾具和加工狀態(tài)以布爾量存放在指定寄存器中,機器人從 Modbus 設備上讀取多個寄存器的值; 通過判斷不同寄存器的布爾量,完成設定 的 動 作 軌 跡; 數(shù) 控 機 床 端 IP 地址配置為192. 168. 0. 101,機器人端數(shù)據(jù)通信程序如下。
3 、機器人運動軌跡規(guī)劃
為了提高自動上下料工業(yè)機器人的工作效率和精度,根據(jù)機器人運動路徑和末端位置姿態(tài),通過調(diào)整運動軌跡平滑參數(shù),在兩條直線路徑中規(guī)劃一段過渡路徑。由于機器人在數(shù)控車床上下料中的運動主要是直線路徑,在相鄰的 2 個路徑上確定出過渡點,采用線性軌跡圓弧過渡。直線路徑采用圓弧過渡算法簡單且通過編程易于實現(xiàn),該指令必須在兩段運動指令間執(zhí)行。系統(tǒng)設計的效果圖與實物圖如圖 5 所示。
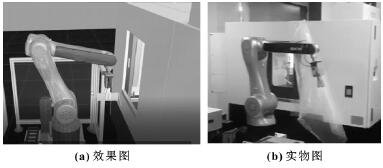
圖 5 系統(tǒng)設計效果圖與實物圖
根據(jù)機器人放置工件需要,機器人末端夾具需要垂直到達起始位置 P1,位置 P1到位置 P2采用直線軌跡如圖 6 所示運動軌跡,從位置 P1水平運動到目標位置 P2垂直 50 cm 處,再垂直運動 50 cm 到達目標位置,通過設置機械下一個運動距離與當前運動距
離重疊 50%,機器人實際運動的軌跡如圖 7 所示。
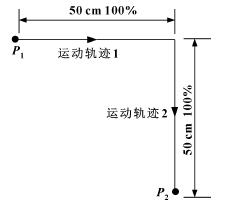
圖 6 直線運動軌跡
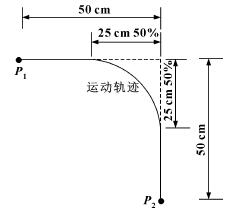
圖 7 圓弧過渡直線軌跡
起始 位置 P1到目標位置 P2之間采用機器人Move. Force Overlap 指令,實現(xiàn)下一個運動距離與目標距離重疊百分數(shù),程序 Move. Force Overlap ( 0,50)實現(xiàn) 2 個距離重疊 50%。
4 、結論
數(shù)控加工單元是智能制造的重要組成部分,為了提高制造加工單元的自動化程度和工作效率,設計了基于工業(yè)機器人的數(shù)控加工制造控制系統(tǒng)。該系統(tǒng)通過協(xié)同控制工業(yè)機器人和數(shù)控機床,實現(xiàn)了機床的自動上下料工作,通過實際工程驗證了控制系統(tǒng)的可靠性,數(shù)控加工效率和安全性得到了提高。
投稿箱:
如果您有機床行業(yè)、企業(yè)相關新聞稿件發(fā)表,或進行資訊合作,歡迎聯(lián)系本網(wǎng)編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機床行業(yè)、企業(yè)相關新聞稿件發(fā)表,或進行資訊合作,歡迎聯(lián)系本網(wǎng)編輯部, 郵箱:skjcsc@vip.sina.com
更多本專題新聞
名企推薦







專題點擊前十
| 更多

