機(jī)床")



基于 VERICUT 的 CKA6150 數(shù)控車床 仿真研究
2017-12-12 來源:天津機(jī)電職業(yè)技術(shù)學(xué)院產(chǎn)學(xué)研中心 作者:趙華,李衛(wèi)兵
摘要:針對(duì)在企業(yè)生產(chǎn)和教育培訓(xùn)領(lǐng)域廣泛使用的 CKA6150 數(shù)控車床,在 VERICUT 中構(gòu)建仿真模型,對(duì)仿真機(jī)床構(gòu)建的一般方法和步驟進(jìn)行探討,給出了構(gòu)建過程中的注意事項(xiàng)和一些實(shí)用技巧。以數(shù)控車床防護(hù)門及四工位回轉(zhuǎn)刀架的控制為例,重點(diǎn)研究了通過宏命令子程序及特殊控制指令定制來控制機(jī)床部件運(yùn)動(dòng)的方法。通過一個(gè)仿真實(shí)例的運(yùn)行,驗(yàn)證了所構(gòu)建仿真機(jī)床的正確性,為宏程序及其它復(fù)雜車削工件加工程序校驗(yàn)及教學(xué)培訓(xùn)提供可靠的 CKA6150 仿真。
關(guān)鍵詞:;CKA6150 數(shù)控車床;宏命令;仿真
VERICUT 是一款專業(yè)的數(shù)控加工仿真軟件,可以對(duì)各種數(shù)控加工設(shè)備的加工過程進(jìn)行仿真,廣泛應(yīng)用于生產(chǎn)和培訓(xùn)領(lǐng)域[1]。VERICUT為用戶提供了豐富的機(jī)床及系統(tǒng)樣本庫(kù),但尚不完善,數(shù)控車床案例缺乏,樣本機(jī)床形式單一,難以實(shí)現(xiàn)復(fù)雜運(yùn)動(dòng)的控制[2]。因此,本文針對(duì)數(shù)控臥式車床 CKA6150 進(jìn)行仿真研究,對(duì)構(gòu)建仿真加工環(huán)境的一般方法和步驟進(jìn)行探討,對(duì)通過宏命令子程序及自定義高級(jí)指令來進(jìn)行機(jī)床附件控制的方法進(jìn)行重點(diǎn)研究。
1 、機(jī)床構(gòu)建
CKA6150 數(shù)控車床是大連機(jī)床廠生產(chǎn)的一款縱(Z)、橫(X)兩坐標(biāo)控制的數(shù)控臥式車床,配有華中世紀(jì)星的數(shù)控系統(tǒng) HNC-21T。CKA6150 數(shù)控車床采用的是平床身結(jié)構(gòu),配有氣動(dòng)卡盤和四工位回轉(zhuǎn)刀架,結(jié)構(gòu)及主要組成部件如圖 1 所示。

圖 1 CKA6150 數(shù)控車床結(jié)構(gòu)及主要部件
分析 CKA6150 數(shù)控車床各部件之間的運(yùn)動(dòng)關(guān)系,組合關(guān)系和相對(duì)位置關(guān)系,根據(jù)說明書中的幾何參數(shù),在 Solid Works 軟件中建立簡(jiǎn)化的機(jī)床 3D 模型如圖 2 所示。在建立裝配體時(shí)一定要注意繪圖區(qū)左下角的坐標(biāo)系要和數(shù)控車床坐標(biāo)系一致(笛卡爾直角坐標(biāo)系),以便輸出的 STL 模型在導(dǎo)入 VERICUT 后能夠配置出正確的運(yùn)動(dòng)方向。
在 Solid Works 軟件中把整個(gè) 3D 模型裝配體另存為 STL 格式導(dǎo)入 VERICUT,進(jìn)行機(jī)床各部件的功能配置。VERICUT 軟件提供了不同類型的 Component(組件),如 Base(床身)、Spindle(主軸)、X Linear(X 軸)、Z Linear(Z 軸)、Turret(刀架)、Stock(毛坯)等。通過建立不同類型的 Component(組件)并添加 3D 模型到某一類型的 Component(組件),對(duì)導(dǎo)入 VERICUT 的每一個(gè) 3D 模型進(jìn)行功能配置。各個(gè) Component(組件)之間可以設(shè)置從屬或者并列的關(guān)系,根據(jù)數(shù)控車床各部件之間的實(shí)際運(yùn)動(dòng)層次關(guān)系建立 Project Tree(項(xiàng)目樹),即機(jī)床部件運(yùn)動(dòng)拓?fù)潢P(guān)系。CKA6150 數(shù)控車床 Project Tree(項(xiàng)目樹)及各部件名稱及Component(組件)類型如圖 3 所示。

圖 2 CKA6150 數(shù)控車床 3D 模型
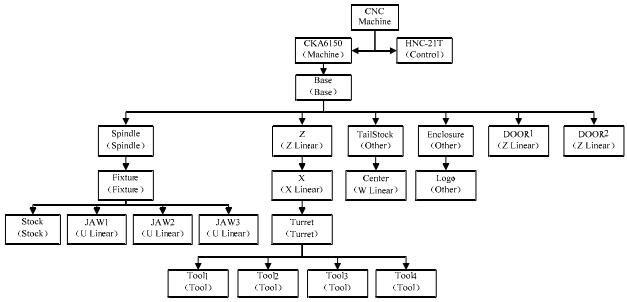
圖 3 CKA6150 數(shù)控車床 Project Tree 簡(jiǎn)圖
VERICUT 機(jī)床構(gòu)建過程中,一個(gè)重要的環(huán)節(jié)是坐標(biāo)系的建立及各部件坐標(biāo)位置的調(diào)整。VERICUT 中可以建立多個(gè)坐標(biāo)系,并設(shè)置其中之一作為當(dāng)前坐標(biāo),同時(shí) VERICUT 還具有多個(gè)性質(zhì)的坐標(biāo)系,如 ZModel、ZComponent、ZMachine 等。每一個(gè) Component(組件)都有一個(gè)組件坐標(biāo)系 ZComponent,它決定著該Component(組件)的運(yùn)動(dòng)方向。組件坐標(biāo)系隨著 Component(組件)位置的改變而改變。
Component(組件)的位置及其 Component(組件)下屬的 3D 模型位置決定著屏幕上 3D 模型的實(shí)際位置,正確理解這一點(diǎn),對(duì)正確構(gòu)建仿真模型極其重要。對(duì)于四工位回轉(zhuǎn)刀架 Turret可以借助 Configure Component>Turret Aid 進(jìn)行設(shè)置。但是由于 VERICUT 默認(rèn)的回轉(zhuǎn)刀架回轉(zhuǎn)軸與 Z 軸平行,這時(shí)就需要沿 Turret 的組件坐標(biāo)系的 X 軸旋轉(zhuǎn) 90°,可以通過 Configure Component>Rotate>Angles,設(shè)置旋轉(zhuǎn)角度為(90 0 0),同時(shí)把 Turret 下屬的所有 3D 模型沿相反方向旋轉(zhuǎn) 90°,即設(shè)置旋轉(zhuǎn)角度為(-90 0 0),才能得到正確的回轉(zhuǎn)刀架運(yùn)動(dòng)。對(duì)于三爪卡盤,只設(shè)置 U Linear(U 軸)一種 Component(組件),然后通過對(duì)相應(yīng)組件坐標(biāo)系的設(shè)置來調(diào)整卡爪的實(shí)際運(yùn)動(dòng)方向,這樣可以簡(jiǎn)化控制系統(tǒng)的定義。具體操作方法為,復(fù)制 JAW1兩次,分別重命名為 JAW2 和 JAW3,通過Configure Component > Rotate > Angles 設(shè) 置JAW2 的旋轉(zhuǎn)角度為(0 0 120),JAW3 的旋轉(zhuǎn)角度為(0 0 -120)。
2 、系統(tǒng)配置
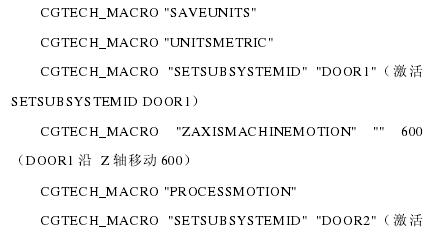
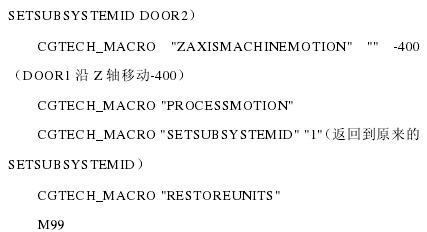
CKA6150 數(shù)控車床配置了華中世紀(jì)星的數(shù)控系統(tǒng) HNC-21T。由于該系統(tǒng)與 FUNAC 系統(tǒng)非常相似,因此可以直接調(diào)用 FUNAC 0T 作為模板進(jìn)行配置,下面以機(jī)床防護(hù)門及三爪卡盤的控制為例,探討系統(tǒng)高級(jí)控制功能的配置。 由于機(jī)床防護(hù)門 DOOR1 和 DOOR2 都采用了 Z Linear(Z 軸)作為 Component(組件)類型,為了加以區(qū)分,通過 Configure Component>Component>Sub System 進(jìn)行 Sub System 的ID 設(shè)置,分別設(shè)置為 DOOR1 和 DOOR2。本文采用在 NC Subroutines 添加子程序,在數(shù)控程序調(diào)用子程序的方式實(shí)現(xiàn)控制,例如關(guān)門子程序及注釋如下所示。
對(duì)于三爪卡盤,由于已經(jīng)通過對(duì)相應(yīng)組件坐標(biāo)系的設(shè)置,使每一個(gè)卡爪的運(yùn)動(dòng)方向 U 和整個(gè)機(jī)床的 X 方向平行,因此可以通過統(tǒng)一的指令設(shè)置來實(shí)現(xiàn)三個(gè)卡爪的同時(shí)向心運(yùn)動(dòng)。任何數(shù)控編碼(指令、變量及字符)都必須首先進(jìn)行字格式的預(yù)定義,才能被虛擬數(shù)控系統(tǒng)識(shí)別和解釋[3]。通過 Configuration>W(wǎng)ord Format>Add 對(duì)卡盤控制所需的字格式進(jìn)行定義,如圖 4所示。
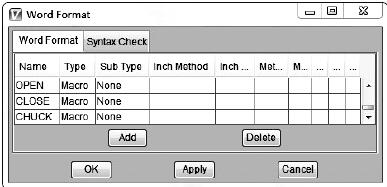
圖 4 字格式的定義
字格式定義之后,通過 Configuration>G-Code Processing>Add 對(duì)這些字的功能進(jìn)行配置。由于三爪卡盤的初始狀態(tài)是張開的極限位置,因此卡爪松開控制時(shí),卡爪相對(duì)初始位置無(wú)需移動(dòng),通過字 OPEN 調(diào)用 VERICUT 的宏命令 UAxis Machine Motion(U 軸移動(dòng))使卡爪沿各自組件坐標(biāo)系的 X 軸移動(dòng)距離為 0;卡爪夾緊控制時(shí),通過字 CLOSE 調(diào)用宏命令UAxis Machine Motion 使卡爪沿各自組件坐標(biāo)系的 X軸移動(dòng),調(diào)用宏命令 Component Name(接觸到的零件名稱)及 Touch(保持運(yùn)動(dòng)直到接觸到某工件)使爪接觸到 Stock(工件)后停止運(yùn)動(dòng)。具體定義如圖 5 所示,指令 OPEN CHUCK 使卡爪松開,指令 CLOSE CHUCK 使卡爪夾緊工件。
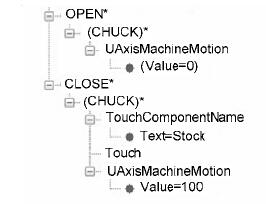
圖 5 卡爪控制指令配置
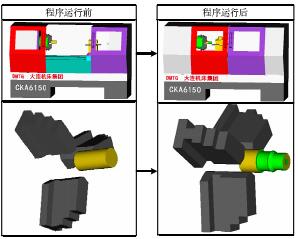
圖 6 仿真實(shí)例驗(yàn)證結(jié)果
3 、結(jié)語(yǔ)
基于 VERICUT 虛擬加工仿真軟件,本文構(gòu)建了 CKA6150 數(shù)控車床,介紹了仿真機(jī)床構(gòu)建的一般方法和步驟,探討了構(gòu)建過程中一些實(shí)用技巧,重點(diǎn)研究了子程序及特殊控制指令的定制方法,給出了數(shù)控車床防護(hù)門和四工位回轉(zhuǎn)刀架的控制指令的配置方法。在該仿真機(jī)床上對(duì)一個(gè)外輪廓車削的教學(xué)實(shí)例進(jìn)行仿真加工,程序運(yùn)行前后如圖 6 所示,驗(yàn)證了本文所構(gòu)建的仿真機(jī)床的正確性。
投稿箱:
如果您有機(jī)床行業(yè)、企業(yè)相關(guān)新聞稿件發(fā)表,或進(jìn)行資訊合作,歡迎聯(lián)系本網(wǎng)編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機(jī)床行業(yè)、企業(yè)相關(guān)新聞稿件發(fā)表,或進(jìn)行資訊合作,歡迎聯(lián)系本網(wǎng)編輯部, 郵箱:skjcsc@vip.sina.com
更多相關(guān)信息

業(yè)界視點(diǎn)
| 更多
查")
行業(yè)數(shù)據(jù)
| 更多
- 2025年5月 新能源汽車銷量情況
- 2025年5月 新能源汽車產(chǎn)量數(shù)據(jù)
- 2025年5月 基本型乘用車(轎車)產(chǎn)量數(shù)據(jù)
- 2025年5月 軸承出口情況
- 2025年5月 分地區(qū)金屬切削機(jī)床產(chǎn)量數(shù)據(jù)
- 2025年5月 金屬切削機(jī)床產(chǎn)量數(shù)據(jù)
- 2025年4月 新能源汽車銷量情況
- 2025年4月 新能源汽車產(chǎn)量數(shù)據(jù)
- 2025年4月 基本型乘用車(轎車)產(chǎn)量數(shù)據(jù)
- 2025年4月 軸承出口情況
- 2025年4月 分地區(qū)金屬切削機(jī)床產(chǎn)量數(shù)據(jù)
- 2025年4月 金屬切削機(jī)床產(chǎn)量數(shù)據(jù)
- 2025年1月 新能源汽車銷量情況
博文選萃
| 更多
- 機(jī)械加工過程圖示
- 判斷一臺(tái)加工中心精度的幾種辦法
- 中走絲線切割機(jī)床的發(fā)展趨勢(shì)
- 國(guó)產(chǎn)數(shù)控系統(tǒng)和數(shù)控機(jī)床何去何從?
- 中國(guó)的技術(shù)工人都去哪里了?
- 機(jī)械老板做了十多年,為何還是小作坊?
- 機(jī)械行業(yè)最新自殺性營(yíng)銷,害人害己!不倒閉才
- 制造業(yè)大逃亡
- 智能時(shí)代,少談點(diǎn)智造,多談點(diǎn)制造
- 現(xiàn)實(shí)面前,國(guó)人沉默。制造業(yè)的騰飛,要從機(jī)床
- 一文搞懂?dāng)?shù)控車床加工刀具補(bǔ)償功能
- 車床鉆孔攻螺紋加工方法及工裝設(shè)計(jì)
- 傳統(tǒng)鉆削與螺旋銑孔加工工藝的區(qū)別