


在線測量刀具圖像調焦特性的鏡頭對比研究
2020-4-4 來源: 中北大學 機械與動力工程學院 作者:楊芳,杜文華,曾志強,王俊元,段能全,等
摘要: 光學系統是在線高精度視覺測量系統的重要模塊,其中遠心鏡頭的引入導致對焦不準、系統復雜度和成本大大提高等問題。文章以實驗室搭建的視覺測量系統為平臺,采用平行背光源,分別用遠心鏡頭和普通鏡頭對數控銑刀進行了直徑測量。根據清晰度比率、靈敏度、局部極值因子等評價指標對兩類鏡頭環境下的 Tenengrad 函數特性進行對比分析。結果顯示,非遠心鏡頭在靈敏度、分辨率和魯棒性更占優勢,高達 35% 左右,而遠心鏡頭具有更好的曲線性,超出 30% 左右。考慮到該在線測量系統應用于復雜工業環境中,應選擇分辨率、靈敏度和魯棒性均占優勢,且成本更低的非遠心鏡頭。
關鍵詞: 在線測量; 刀具; 圖像; 調焦評價函數
0 引言
隨著機器視覺和視覺機器測量要求的不斷提高,測量系統調焦環境的好壞對整體系統測量精度的影響至關重要。調焦模塊的對焦問題離不開鏡頭的選擇,遠心鏡頭和普通鏡頭二者的工作景深、透視變形、調焦精度和價格成本等無法平衡。
目前國內外實驗室研究和制造企業生產的視覺測量系統設計研究中,不少學者從不同角度提出不同的調焦評價函數來對圖像的清晰程度進行評價,現提出的評價函數有幾十種,主要從靈敏度、單調范圍、無偏性、信噪比和局部極值因子等指標對聚焦函數的性能進行評定,其調焦模塊考慮具有較大的工作景深和消除透視變形以及由于透視變形產生的被測物遮擋的情況,采用遠心鏡頭,但是隨之會造成較大的成本提高,對于大批量產品來說會造成較大的成本提升。
本文從保證調焦函數的特性出發,對所獲圖像的調焦函數曲線特性進行評價,擬通過多項性能的比較,在同一測量精度和調焦要求下,發現非遠心鏡頭代替遠心鏡頭的可能性。研究中所涉及的在線測量相關問題,將擴展現有視覺測量技術的研究范圍和深度,對不同測量任務所需調焦模塊的設計研究具有重要的理論意義。此外,相關研究成果對于滿足同一精度動態測量工況的鏡頭選擇具有重要工程應用價值。
1、 圖像調焦函數理論分析
一個理想調焦曲線,在正焦位置的圖像有著很尖銳的邊緣,而在圖像處理中,常用梯度函數來提取圖像的邊緣信息,因此可以選擇梯度函數來作為圖像清晰度評價函數。圖像的清晰程度與其梯度值成正相關,邊緣越鋒利,梯度值越大,則圖像越清晰。
在自主開發的在線刀具測量系統中,被測對象主要是銑刀,一般來說圖像的灰度變化比較均勻,刀具邊緣圖像部分存在一定的過渡區,即該刀具的圖像在邊緣邊界位置灰度值變化不是很劇烈,本文選用聚焦函數值變化明顯的 Tenengrad 函數作為視覺測量系統調焦模塊的調焦評價函數。
Tenengrad 函數是先通過使用 Sobel 算子對圖像進行邊緣檢測,然后計算圖像的梯度值,它包括水平和垂直兩個方向的梯度值,分別用水平模板和垂直模板來提取。然后可利用 Tenengrad 函數來計算圖像清晰度,該函數的計算式[7]如式 ( 1) 、( 2) 、( 3) 所示:
在式( 1) ~ 式( 3) 中,Sx和 Sy分別是水平、垂直方向的梯度值,f( x,y) 是圖像中某一像素點( x,y) 的灰度值,E 是評價函數。
圖像清晰度評價函數的特點: 由光學原理可知,當成像目標處在焦平面時所成的像是最清晰的,在其它位置都不清晰,并且離焦平面越遠,圖像越不清晰,因此可以用圖像的清晰程度來表明測量系統所成像目標的離焦、正焦程度。圖像清晰度評價函數曲線特性主
要通過下面五個評價指標進行定量評估[8-10]。
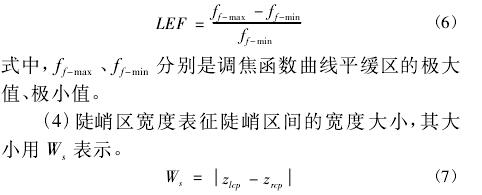
( 1) 清晰度比率大小表征調焦評價函數離焦時的分辨率強弱,其值用 R 表示。

式中,分子表示調焦評價函數的極大值,分母表示其極小值。
( 2) 靈敏度強弱表征評價函數曲線變化的劇烈程度,其值用 SEN 表示。

式中,f (zmax+ε) 是評價函數曲線的 x 軸變化為 ε 時的函數值,ε 是調焦評價函數值發生突變時 x 軸的改變值。
( 3) 局部極值因子大小表征曲線平緩區的陡峭程度,大小用 LEF 表示。
2 、實驗系統搭建
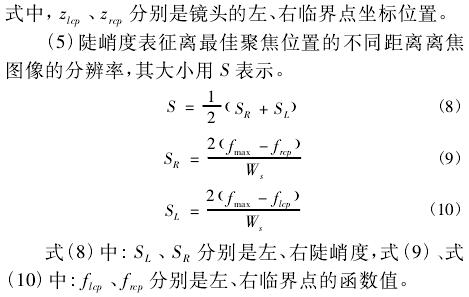
本文采用自行研發的高精度視覺測量系統實驗平臺來采集圖像數據。實驗平臺如圖 1 所示,其主要性能參數如下: 圖像采集系統采用 CgImageTech 相機,相機傳感器尺寸 2 /3 inch,分辨率 1392 × 1040 pixel; 光路系統采用鏡頭 a( Computar 非遠心鏡頭) ,鏡頭 b( 艾菲特 BT-2316 遠心鏡頭) ,采用平行背光源照明。測試條件如下,CPU: Intel Core( TM) i3-2330M@ 2. 20GHz,內存: 4GB; 軟件采用 C++ 編程實現。
圖 1 實驗平臺
3 、實驗結果與分析
分別用 Computar 鏡頭 a 和艾菲特 BT-2316 鏡頭 b為光學系統,每種鏡頭采集的圖像存為一組,每組采集10 次,每次以深度離焦—輕度離焦—聚焦—輕度離焦—深度離焦為一個周期,這樣獲取了兩組圖像數據。圖 2 給出了銑刀在一個調焦周期中的三種調焦狀態的圖像,分別為深度離焦圖像、輕度離焦圖像和聚焦圖像。
圖 2 三種聚焦狀態的銑刀圖像
用梯度平方函數對圖像內所選擇的區域進行計算,將所得的數據存入文件,用軟件對生成的數據文件進行分析和繪圖,同時記錄多次調焦過程中的 Tenen-grad 梯度函數值的變化,測試調焦函數值的抖動情況。因不同鏡頭對同一目標成像的最佳聚焦位置不同,為了便于對比研究,將兩條曲線的最佳對焦位置橫坐標對齊,得到歸一化的 Tenengrad 函數曲線,如圖 3 所示。
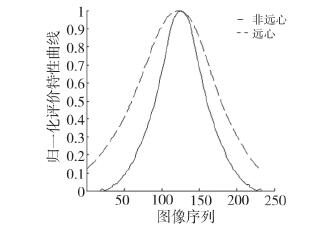
圖 3 兩類鏡頭環境下 Tenengrad 函數曲線歸一化
將 Tenengrad 函數曲線進行特性曲線性能分析,分別計算兩類鏡頭下的清晰度比率、靈敏度、局部極值因子、陡峭區寬度和陡峭度,計算結果如表 1 所示,對于調焦函數曲線,評價指標 R 值越大,分辨率越強; SEN值越大,靈敏度越高; LEF 值越小,魯棒性越好; Ws越小,曲線性越好; S 值越大,分辨力越強。
表 1 兩類鏡頭下 Tenengrad 函數曲線性能對比
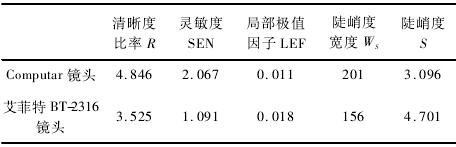
由表 1 中的數據可知,Computar 鏡頭對應的 R 值、SEN 值和 LEF 值三方面是相互統一的,非遠心鏡頭在清晰度比率、靈敏度和局部極值因子三個指標下均明顯高于遠心鏡頭,清晰度比率高出 27% ,靈敏度高出47% ,局部極值因子高出 38% ,可以看出非遠心鏡頭在分辨率、靈敏度和魯棒性特性上占優勢; 而艾菲特BT-2316 鏡頭在陡峭區寬度和陡峭度指標下占劣勢,Ws低于遠心鏡頭 22% ,S 值低于遠心鏡頭 34% ,可以看出遠心鏡頭在曲線性和不同程度離焦圖像的分辨率方面弱于遠心鏡頭。
本實驗室研發的在線測量系統應用于復雜工業環境時,存在機床振動或干擾等特點,這不僅要求有良好的分辨率和靈敏度,對干擾的敏感程度的要求更高,即聚焦函數的魯棒性更具優越性,所以優先選擇分辨率、靈敏度和魯棒性均占優勢,同時成本更低的非遠心鏡頭。
4 、結論
為解決視覺測量系統中調焦模塊的遠心鏡頭導致的系 統 復 雜 度 和 成 本 的 增 加 問 題,本 文 采 用 Te-nenegrad 函數,該調焦函數可用于實驗室的視覺測量系統的調焦模塊,分析對比了遠心鏡頭和非遠心鏡頭兩類鏡頭環境下的聚焦函數調焦特性,以實驗室自主研發的“刀具測量儀”中的調焦模塊為實驗平臺,采用多項評價指標對評價函數進行實驗對比研究,發現非遠心鏡頭的分辨率、靈敏度和魯棒性性能更優,遠心鏡頭的陡峭區寬度和陡峭度即曲線性更好,基于在線測量系統應用于復雜工業環境的特點,應選擇分辨率、靈敏度和魯棒性均占優勢,同時成本更低的非遠心鏡頭。同時此對比研究為實踐中的調焦系統和視覺測量系統設計提供一定理論指導,為鏡頭的權衡和調焦實際應用提供參考。
投稿箱:
如果您有機床行業、企業相關新聞稿件發表,或進行資訊合作,歡迎聯系本網編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機床行業、企業相關新聞稿件發表,或進行資訊合作,歡迎聯系本網編輯部, 郵箱:skjcsc@vip.sina.com
更多相關信息

