機(jī)床")



基于智能交流接觸器的采摘機(jī)器人機(jī)械臂設(shè)計(jì)
2017-7-20 來(lái)源:河南工業(yè)職業(yè)技術(shù)學(xué)院 作者:王臻卓,李偉,范樂(lè)
摘要: 在充分考慮機(jī)械臂伺服電機(jī)智能速度檢測(cè)裝置的結(jié)構(gòu)和閉環(huán)運(yùn)動(dòng)過(guò)程控制的基礎(chǔ)上,將智能交流接觸器引入到了采摘機(jī)器人機(jī)械臂關(guān)節(jié)伺服電機(jī)的反饋控制中,并建立了 PID 閉環(huán)反饋調(diào)節(jié)回路,有效地提高了機(jī)械臂的控制精度。同時(shí),將智能交流接觸器以速度控制函數(shù)的形式嵌入到了 PID 控制環(huán)節(jié),采用 ADMAS 和 Mat-Lab 軟件對(duì)機(jī)械臂的軌跡控制精度進(jìn)行了測(cè)試 ,并利用 Mat Lab 軟件計(jì)算得到了關(guān)節(jié)的控制變量 ,以 Spline 形式將變量導(dǎo)入到了 ADMAS 中對(duì)機(jī)械臂兩關(guān)節(jié)進(jìn)行控制。通過(guò)仿真得到了機(jī)械臂關(guān)節(jié)的輸入和輸出位移隨時(shí)間變化曲線和機(jī)械臂末端的運(yùn)動(dòng)結(jié)果,結(jié)果表明: 輸入和輸出的位移基本吻合,并且機(jī)械臂末端可以按照預(yù)定的圓環(huán)軌跡運(yùn)動(dòng),從而驗(yàn)證了智能交流接觸器 PID 控制的控制精度。
關(guān)鍵詞: 采摘機(jī)器人; 機(jī)械臂; 交流接觸器; 閉環(huán)運(yùn)動(dòng)
0.引言
目前,速度檢測(cè)裝置一般為速度傳感器,且多為角速度傳感器。線速度傳感器由于其測(cè)量精度較低、檢測(cè)范圍小等因素未能得到廣泛應(yīng)用; 而應(yīng)用較多的渦流位移傳感器量程較小,結(jié)構(gòu)復(fù)雜,無(wú)法在采摘機(jī)器人機(jī)械臂的關(guān)節(jié)伺服電機(jī)接觸器上應(yīng)用。充分考慮接觸器的結(jié)構(gòu)和閉環(huán)運(yùn)動(dòng)過(guò)程控制的影響,將智能交流接觸器引入到了采摘機(jī)器人機(jī)械臂關(guān)節(jié)伺服電機(jī)的反饋控制中,該檢測(cè)裝置基于電磁感應(yīng)原理,可以根據(jù)線圈中感應(yīng)電動(dòng)勢(shì)大小計(jì)算出銜鐵的運(yùn)動(dòng)速度; 而銜鐵可以嵌入到機(jī)械臂材料中,實(shí)現(xiàn)了機(jī)械臂伺服電機(jī)的閉環(huán)反饋控制,對(duì)于微機(jī)電技術(shù)在采摘機(jī)器人中的應(yīng)用具有重要的意義。
1.機(jī)械臂關(guān)節(jié)速度檢測(cè)電路結(jié)構(gòu)原理
為了實(shí)現(xiàn)采摘機(jī)器人機(jī)械臂關(guān)節(jié)伺服電機(jī)的速度自主檢測(cè),將電力電子技術(shù)應(yīng)用到了電機(jī)的閉環(huán)反饋調(diào)節(jié)系統(tǒng)中,并利用電壓控制模式及 Buck 電路實(shí)現(xiàn)交流接觸器的智能控制,從而可以實(shí)現(xiàn)接觸器的閉環(huán)控制,并快速、準(zhǔn)確地調(diào)節(jié)線圈的電流大小。閉環(huán)反饋調(diào)節(jié)可以實(shí)現(xiàn)電壓和電流閉環(huán)的快速切換,當(dāng)機(jī)械臂關(guān)節(jié)伺服電機(jī)輸出的電流小于設(shè)定電流閾值時(shí),壓閉環(huán)工作,接觸器實(shí)現(xiàn)恒壓工作; 當(dāng)伺服電機(jī)輸出的電壓小于設(shè)定電壓閾值時(shí),電流閉環(huán)工作,接觸器實(shí)現(xiàn)恒流工作。其工作原理如圖 1 所示。
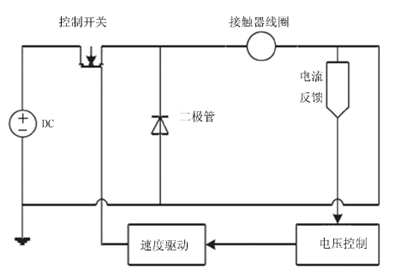
圖 1 采摘機(jī)器人機(jī)械臂關(guān)節(jié)速度檢測(cè)電路
采摘機(jī)器人的機(jī)械臂作為動(dòng)磁體,主磁路的設(shè)計(jì)包含永磁體,其安放的位置和磁壓降需要計(jì)算得到,磁路中的感應(yīng)強(qiáng)度呈現(xiàn)線性變化,氣隙磁感應(yīng)強(qiáng)度基本恒定,其結(jié)構(gòu)如圖 2 所示。永磁體的磁壓降變化會(huì)對(duì)磁鏈產(chǎn)生較大的影響,為了降低這種影響,將永磁體安裝在靜磁極上,這樣永磁極產(chǎn)生的磁壓基本恒定,而永磁體的等效磁動(dòng)勢(shì)和磁導(dǎo)率為
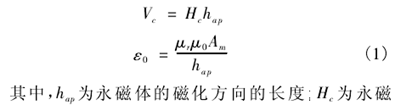
體磁感應(yīng)的矯頑力; μr和 μ0分別為靜磁體和永磁體的磁導(dǎo)率; Am為動(dòng)磁極的橫截面積。結(jié)合永磁體的等效磁動(dòng)勢(shì)和磁導(dǎo)率對(duì)檢測(cè)裝置進(jìn)行了尺寸優(yōu)化,主要包括動(dòng)磁極的鐵芯尺寸、靜磁極的截面積、靜磁極的鐵芯長(zhǎng)度、動(dòng)靜磁極的氣隙長(zhǎng)度和測(cè)量線圈的匝數(shù)。參數(shù)優(yōu)化提高了速度檢測(cè)裝置的靈敏度和測(cè)量精度。
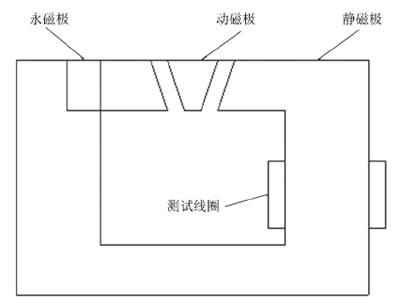
圖 2 機(jī)械臂關(guān)節(jié)速度檢測(cè)裝置優(yōu)化結(jié)構(gòu)圖
2.采摘機(jī)器人關(guān)節(jié)控制馬達(dá)結(jié)構(gòu)和原理
采摘機(jī)器人機(jī)械臂關(guān)節(jié)控制采用的是微機(jī)電技術(shù),該技術(shù)采用微型伺服馬達(dá)控制關(guān)節(jié)的運(yùn)動(dòng)速度。馬達(dá)的內(nèi)部包含一個(gè)速度檢測(cè)器、小型直流馬達(dá)、一組變速器、反饋調(diào)節(jié)電位和電子控制板,如圖 3 所示。機(jī)械臂的原始動(dòng)力由直流馬達(dá)提供,可以產(chǎn)生較高扭力的輸出,當(dāng)齒輪組的變速比越大時(shí),伺服馬達(dá)可以輸出的轉(zhuǎn)矩也越大,承受的重力也越多,但是轉(zhuǎn)動(dòng)速度卻越低。
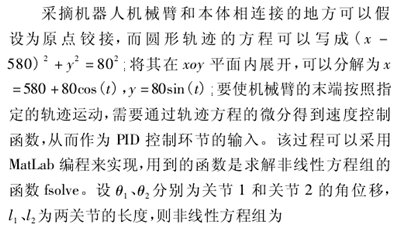
圖 3 微型伺服馬達(dá)內(nèi)部結(jié)構(gòu)圖
微型伺服馬達(dá)是典型的閉環(huán)反饋控制系統(tǒng),其控制指令主要是由控制脈沖發(fā)出,其原理如圖 4 所示。減速齒輪組由馬達(dá)驅(qū)動(dòng),在終端安裝有速度檢測(cè)裝置和電位器。速度檢測(cè)裝置檢測(cè)的速度參數(shù)在電位器以比例電壓或者比例電流的形式反饋給控制線路板; 控制線路板對(duì)輸入控制脈沖信號(hào)進(jìn)行比較,產(chǎn)生糾正脈沖,實(shí)現(xiàn)馬達(dá)的正向和反向轉(zhuǎn)動(dòng)。通過(guò)反饋調(diào)節(jié),可以使齒輪組的輸出位置和預(yù)期的期望值相符,使糾正脈沖的值趨向于 0,實(shí)現(xiàn)了馬達(dá)的準(zhǔn)確定位。為了實(shí)現(xiàn)微伺服馬達(dá)的線性控制,采用 PID 控制器,其結(jié)構(gòu)如圖 5 所示。
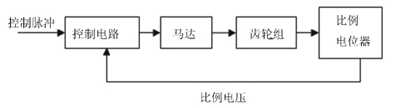
圖 4 微型伺服馬達(dá)工作原理圖
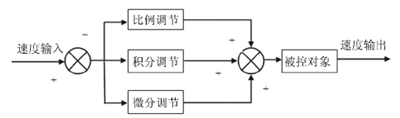
圖 5 PID 控制器結(jié)構(gòu)
采摘機(jī)器人機(jī)械臂關(guān)節(jié)伺服電機(jī)閉環(huán)回路主要運(yùn)用 PID 控制器進(jìn)行調(diào)節(jié),其控制方程為
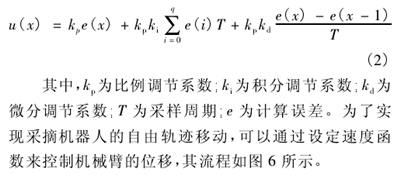
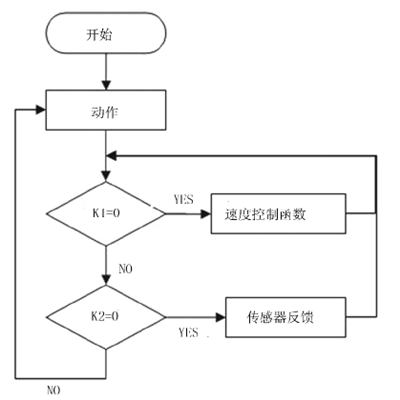
圖 6 基于速度函數(shù)的機(jī)械臂軌跡控制
采摘機(jī)器人的機(jī)械臂動(dòng)作主要由關(guān)節(jié)的伺服電機(jī)控制,而伺服電機(jī)不能直接控制機(jī)械臂的軌跡位移,因此只能將軌跡位移通過(guò)微分的方式轉(zhuǎn)換為速度函數(shù)。當(dāng)機(jī)器人的機(jī)械臂按照合理的速度移動(dòng)時(shí),系統(tǒng)返回值為 YES,機(jī)器人根據(jù)控制移動(dòng)速度函數(shù)進(jìn)行相應(yīng)的動(dòng)作; 當(dāng)機(jī)器人的機(jī)械臂違背了合理的移動(dòng)速度時(shí),機(jī)械臂將結(jié)合傳感器函數(shù)和速度來(lái)控制函數(shù)調(diào)整。
3.智能交流接觸器動(dòng)作軌跡規(guī)劃測(cè)試
為了驗(yàn)證智能交流接觸器對(duì)采摘機(jī)器人機(jī)械臂軌跡規(guī)劃的作用,將速度檢測(cè)裝置作為機(jī)械臂動(dòng)作控制的反饋調(diào)節(jié)裝置,以 PID 控制器速度函數(shù)的形式引入到 PID 控制環(huán)境,并通過(guò) ADAMS 仿真來(lái)驗(yàn)證軌跡控制的精度。為了簡(jiǎn)化測(cè)試過(guò)程,將采摘機(jī)器人在采摘果實(shí)和放回果盤的動(dòng)作簡(jiǎn)化為近似圓環(huán)形的動(dòng)作,在 ADAMS /View 中用 Contros Toolkits 建立控制系統(tǒng),通過(guò)智能速度檢測(cè)器速度控制函數(shù)的 PID 環(huán)節(jié)控制,控制機(jī)械臂每個(gè)關(guān)節(jié)的單分量力矩,使機(jī)械臂的末端運(yùn)動(dòng)軌跡為圓。
計(jì)算完成后,矩陣 r1 里面保存的是關(guān)節(jié) 1 的角速度,矩陣 r2 里面保存的是關(guān)節(jié) 2 的角速度,變量可以以 SPLINE 的形式輸入到 ADAMS 中,作為模型的關(guān)節(jié)輸入。使用 ADMAS 建立控制系統(tǒng)的步驟如下:1) 首先建立采摘機(jī)器人機(jī)械臂的模型,在機(jī)械臂的關(guān)節(jié)處分別添加智能交流接觸器的速度函數(shù),然后將其他數(shù)值初始化為 0。2) 將 Mat Lab 計(jì)算得到的數(shù)據(jù)導(dǎo)出,然后在 AD-MAS 軟件中以 Spline 形式導(dǎo)入。建立一個(gè) d1. txt 文檔保存在 ADMAS 工作目錄下,文檔中的數(shù)據(jù)主要有兩列組成: 第 1 列為時(shí)間,第 2 列為 r1 矩陣; 在 import中導(dǎo)入數(shù)據(jù),然后點(diǎn)擊 ok 后便可以導(dǎo)入 Mat Lab 計(jì)算得到的數(shù)據(jù)。在 PID 控制環(huán)節(jié)中設(shè)置各種參數(shù)后,單擊 F8 可以進(jìn)入后處理模塊中,在后處理模塊中可以將關(guān)節(jié)的輸入和輸出位移進(jìn)行比較,根據(jù)位移的重合度,得到控制的誤差,如圖 7 所示。關(guān)節(jié) 1 輸入和輸出位置分布以 spline1_input 和 angl_joint1 表示。由圖 7 可以看出: 采摘機(jī)器人機(jī)械臂關(guān)節(jié) 1 的位移輸入和輸出隨時(shí)間變化的曲線非常吻合,從而驗(yàn)證了控制的精度。
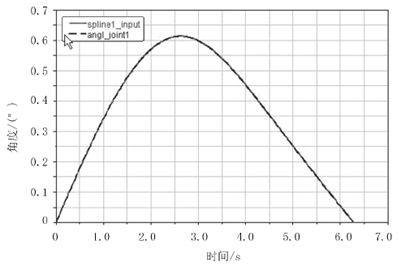
圖 7 關(guān)節(jié) 1 的位移調(diào)節(jié)曲線
關(guān)節(jié) 2 輸入和輸出位置分布以 spline2 _input 和angl_joint2 表示。為了進(jìn)一步驗(yàn)證智能交流接觸器速度函數(shù)的 PID 控制精度,對(duì)關(guān)節(jié) 2 的輸入和輸出位移進(jìn)行了繪制,如圖 8 所示。由圖 8 可以看出: 關(guān)節(jié) 2 輸入和輸出的位移也非常吻合,從而進(jìn)一步驗(yàn)證了智能交流接觸器速度函數(shù)的 PID 控制精度。
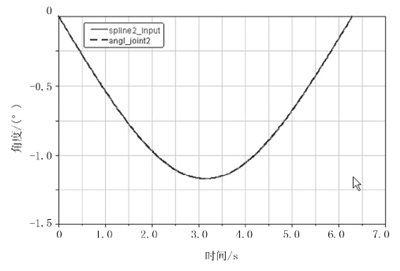
圖 8 關(guān)節(jié) 2 的位移調(diào)節(jié)曲線
在 ADMAS 后處理中還可以對(duì)機(jī)械臂末端的軌跡進(jìn)行查看,依次點(diǎn)擊 Review→Create Trace Spline,選擇關(guān)節(jié) 2 和關(guān)節(jié) 1 的端點(diǎn),移動(dòng)鼠標(biāo)到 Joint1 處,右擊在對(duì)話框選擇 ground,單擊 OK 便可以創(chuàng)建機(jī)械臂末端的軌跡,如圖 9 所示。由圖 9 可以看出: 機(jī)械臂末端可以嚴(yán)格地按照?qǐng)A環(huán)進(jìn)行運(yùn)動(dòng)。這說(shuō)明,在 PID 控制中加入智能交流接觸器的速度控制函數(shù)可以有效地實(shí)現(xiàn)采摘機(jī)器人機(jī)械臂的軌跡控制,并且軌跡控制的精度較高。

圖 9 機(jī)械臂末端軌跡
4.結(jié)論
以交流接觸器速度函數(shù)的形式控制機(jī)械臂的移動(dòng)軌跡,建立了 PID 閉環(huán)反饋調(diào)節(jié)回路,有效地提高了機(jī)械臂的控制精度。為了驗(yàn)證該方法的可靠性,采用 ADMAS 和 Mat Lab 軟件聯(lián)合仿真的方法,對(duì)機(jī)械臂關(guān)節(jié)的輸入和輸出位移隨時(shí)間變化曲線和機(jī)械臂末端的移動(dòng)軌跡進(jìn)行了計(jì)算。仿真結(jié)果表明輸入和輸出的位移基本吻合,從而驗(yàn)證了智能交流接觸器在機(jī)械臂軌跡控制中應(yīng)用的可行性。
投稿箱:
如果您有機(jī)床行業(yè)、企業(yè)相關(guān)新聞稿件發(fā)表,或進(jìn)行資訊合作,歡迎聯(lián)系本網(wǎng)編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機(jī)床行業(yè)、企業(yè)相關(guān)新聞稿件發(fā)表,或進(jìn)行資訊合作,歡迎聯(lián)系本網(wǎng)編輯部, 郵箱:skjcsc@vip.sina.com
更多相關(guān)信息

業(yè)界視點(diǎn)
| 更多
查")
行業(yè)數(shù)據(jù)
| 更多
- 2025年5月 新能源汽車銷量情況
- 2025年5月 新能源汽車產(chǎn)量數(shù)據(jù)
- 2025年5月 基本型乘用車(轎車)產(chǎn)量數(shù)據(jù)
- 2025年5月 軸承出口情況
- 2025年5月 分地區(qū)金屬切削機(jī)床產(chǎn)量數(shù)據(jù)
- 2025年5月 金屬切削機(jī)床產(chǎn)量數(shù)據(jù)
- 2025年4月 新能源汽車銷量情況
- 2025年4月 新能源汽車產(chǎn)量數(shù)據(jù)
- 2025年4月 基本型乘用車(轎車)產(chǎn)量數(shù)據(jù)
- 2025年4月 軸承出口情況
- 2025年4月 分地區(qū)金屬切削機(jī)床產(chǎn)量數(shù)據(jù)
- 2025年4月 金屬切削機(jī)床產(chǎn)量數(shù)據(jù)
- 2025年1月 新能源汽車銷量情況
博文選萃
| 更多
- 機(jī)械加工過(guò)程圖示
- 判斷一臺(tái)加工中心精度的幾種辦法
- 中走絲線切割機(jī)床的發(fā)展趨勢(shì)
- 國(guó)產(chǎn)數(shù)控系統(tǒng)和數(shù)控機(jī)床何去何從?
- 中國(guó)的技術(shù)工人都去哪里了?
- 機(jī)械老板做了十多年,為何還是小作坊?
- 機(jī)械行業(yè)最新自殺性營(yíng)銷,害人害己!不倒閉才
- 制造業(yè)大逃亡
- 智能時(shí)代,少談點(diǎn)智造,多談點(diǎn)制造
- 現(xiàn)實(shí)面前,國(guó)人沉默。制造業(yè)的騰飛,要從機(jī)床
- 一文搞懂?dāng)?shù)控車床加工刀具補(bǔ)償功能
- 車床鉆孔攻螺紋加工方法及工裝設(shè)計(jì)
- 傳統(tǒng)鉆削與螺旋銑孔加工工藝的區(qū)別