



基于 LabVIEW 舵機機械臂控制
2017-5-2 來源:華北理工大學(xué) 作者:王夢雅,楊志剛
摘要:分析了六自由度機器人的特點及功能需求,設(shè)計了基于 LabVIEW 的多路舵機控制系統(tǒng),硬件核心采用STC89C52單片機,關(guān)節(jié)驅(qū)動采用舵機控制。通過實驗,實現(xiàn)了六自由度機械臂的關(guān)節(jié)控制。實驗結(jié)果顯示:該系統(tǒng)運行平穩(wěn),控制效果良好,且協(xié)調(diào)性很高,對機械臂的研究具有一定的參考價值。
關(guān)鍵詞:LabVIEW;舵機控制;六自由度機器人
0.引言
在我們的日常生活中,有很多勞動強度大、長時間單調(diào)重復(fù)的工作,或?qū)Ξa(chǎn)品質(zhì)量要求高的工作,或需要人類在危險、惡劣的環(huán)境下作業(yè) 的工作,在這種背景下,近年來國內(nèi)外對機械手臂的研究日趨深入。在機械手臂的研究過程中,多關(guān)節(jié)的協(xié)調(diào)控制是實現(xiàn)機械手臂抓取物體的基礎(chǔ)。針對這個問題,本文設(shè)計了六自由度機械手,通過多路舵機控制器協(xié)調(diào)驅(qū)動各手部關(guān)節(jié),最后通過虛擬儀器 LabVIEW 實驗對其進行了驗證。
1.六自由度機械手硬件結(jié)構(gòu)
六自由度機械手具有6個舵機控制其關(guān)節(jié),控制器采用STC89C52單片機,具有速度快、靈活度高、抗干擾的優(yōu)點。機械手采用32路舵機控制器對各關(guān)節(jié)進行控制。1.1 機械臂在本文中,設(shè)計一個能夠用于物品搬運的六自由度機械手臂,機械手臂的運動包括底座的旋轉(zhuǎn)、大臂的轉(zhuǎn)動、小臂的轉(zhuǎn)動、手腕的上下擺動與左右旋轉(zhuǎn)、手爪的張合,即機械手臂的自由度為6。六自由度機械臂模擬圖見圖1。本機械手臂中的各軸之間相互聯(lián)系并相互獨立運行,各機構(gòu)互不干涉。
1.2舵機
舵機按照轉(zhuǎn)動角度分有 180°舵機和 360°舵 機。180°舵機只能在0°到180°之間運動,如果超過這個范圍,舵機就會因為超出量程而發(fā)生故障。360°舵機可以連續(xù)轉(zhuǎn)動,我們可以控制它的轉(zhuǎn)動方向和速度。
以180°舵機為例,它有3條引線:電源線 VCC、地線 GND 與控制信號線。控制信號為直流偏置電壓,由接收機的通道進入信號調(diào)制芯片獲得。舵機內(nèi)部有一個基準電路,產(chǎn)生周期為20 ms、寬度為1.5 ms左右的基準信號,舵機輸出轉(zhuǎn)角與輸入信號脈沖寬度的關(guān)系見圖2。舵機將獲得的直流偏置電壓與電位器的電壓比較,獲得電壓差輸出;將電壓差的正負輸出到機驅(qū)動芯片來決定電機的正、反轉(zhuǎn)。
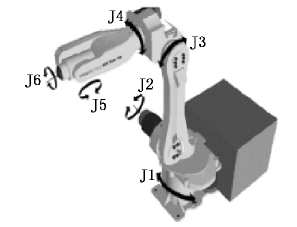
圖1 六自由度機械臂模擬圖
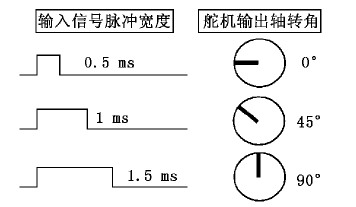
圖2 舵機輸出轉(zhuǎn)角與輸入信號脈沖寬度的關(guān)系
2.舵機控制器通信
2.1舵機控制板
舵機控制器的主要功能是驅(qū)動多路舵機,其內(nèi)部寫有與外部設(shè)備進行通信的串口協(xié)議,通過 PC 機操作上位機軟件給控制器傳遞控制指令信號,即可實現(xiàn)多路伺服電機單獨控制或同時控制。舵機控制板需要舵機電源和芯片電源兩個電源。本文設(shè)計選用的電源在輸出5V 電壓時,可承受2A 的電流,可保證6路舵機的正常運轉(zhuǎn)。而芯片電源所需的功率較小,PC的 USB口供電即可使證芯片正常工作。
2.2 VISA 通信
VISA 通信部分程序如圖3所示。VISA 是虛擬儀器系統(tǒng)I/O 接口軟件。基于自底向上結(jié)構(gòu)模型的 VISA 創(chuàng)造了一個統(tǒng)一形式的I/O 控制函數(shù)集。常用的 VI包括 VISA 配置串口、VISA 寫入、VISA 讀取、VISA 關(guān)閉等子函數(shù)。VISA 部分 VI圖標見圖4。
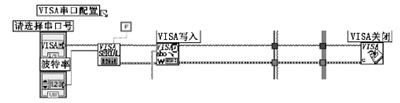
圖3 VISA 通信部分程序
舵機控制板的命令格 式為 “#1P%d#2P%d#3P%d#4P%d#13P%d#14P%d#1”。數(shù)據(jù)1,2,3,4,13,14 是 舵 機 的 通 道;字 母 P 后 面 是 6 個 舵 機 的PWM 脈寬值。本文用到了“格式化寫入字符串”命令,這個函數(shù)左側(cè)的6個輸入端輸入的數(shù)據(jù)就是格式字符串的6個%d所對應(yīng)的實時舵機脈寬值,舵機脈寬值通過前面板旋鈕來控制。然后將6個整數(shù)數(shù)據(jù)組合成的字符串送到 VISA 寫入函數(shù)的寫入緩沖區(qū)。
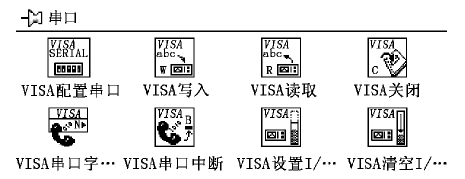
圖4 VISA 部分 VI圖標
LabVIEW 舵機控制部分程序如圖5所示。
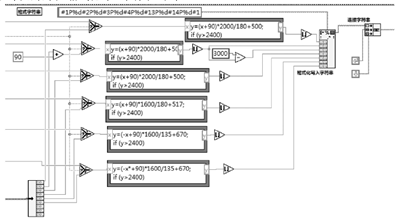
圖5 LabVIEW 舵機控制部分程序
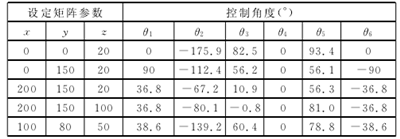
表1 控制角度變化表
4.結(jié)論
分析了六自由度機器人的特點及功能需求,設(shè)計了基于 LabVIEW 的多路舵機控制系統(tǒng),硬件核心采用STC89C52單片機,關(guān)節(jié)驅(qū)動采用舵機控制。運用LabVIEW 完成了六自由度機械臂舵機控制的軟件實現(xiàn),并通過對機械臂的運動控制驗證了該方法的可行性。LabVIEW的優(yōu)點在于可以直接生成可執(zhí)行文件,這使仿真調(diào)試到實際控制的過渡非常簡單,簡化了舵機控制系統(tǒng)的設(shè)計過程。實驗結(jié)果顯示,該系統(tǒng)運行平穩(wěn)、控制效果良好并且協(xié)調(diào)性很高,對機械臂的研究具有一定的參考價值。
投稿箱:
如果您有機床行業(yè)、企業(yè)相關(guān)新聞稿件發(fā)表,或進行資訊合作,歡迎聯(lián)系本網(wǎng)編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機床行業(yè)、企業(yè)相關(guān)新聞稿件發(fā)表,或進行資訊合作,歡迎聯(lián)系本網(wǎng)編輯部, 郵箱:skjcsc@vip.sina.com
更多相關(guān)信息

業(yè)界視點
| 更多
查")
行業(yè)數(shù)據(jù)
| 更多
- 2025年5月 新能源汽車銷量情況
- 2025年5月 新能源汽車產(chǎn)量數(shù)據(jù)
- 2025年5月 基本型乘用車(轎車)產(chǎn)量數(shù)據(jù)
- 2025年5月 軸承出口情況
- 2025年5月 分地區(qū)金屬切削機床產(chǎn)量數(shù)據(jù)
- 2025年5月 金屬切削機床產(chǎn)量數(shù)據(jù)
- 2025年4月 新能源汽車銷量情況
- 2025年4月 新能源汽車產(chǎn)量數(shù)據(jù)
- 2025年4月 基本型乘用車(轎車)產(chǎn)量數(shù)據(jù)
- 2025年4月 軸承出口情況
- 2025年4月 分地區(qū)金屬切削機床產(chǎn)量數(shù)據(jù)
- 2025年4月 金屬切削機床產(chǎn)量數(shù)據(jù)
- 2025年1月 新能源汽車銷量情況