



基于 PLC 的 RV 減速機實驗臺系統的設計與實現
2017-6-9 來源:天津職業技術師范大學機械工程學院 作者:黃賢振
摘要:減速機是工業機械臂重要的核心零部件,它的主要作用是把機械臂中交流電機高轉速、低扭矩的輸出轉換成低轉速、大扭矩的輸出。 一般大負載的情況下通常選用 RV 減速機。本文中通過設計基于 PLC 控制技術模擬工業機械臂的肘關節,驗證多段速情況下減速機實際輸出曲線。該實驗臺以 PLC 為核心控制器,通過變頻器控制實現交流電機的多端速,通過模擬量模塊檢測交流電機工作過程中的實時轉速,通過張力控制器模擬機械臂工作的負載。
關鍵詞:RV 減速機;PLC;人機交互界面;模擬量
隨著機器人產業的發展,工業機器人作為最為重要的一個分支,近年來取得長足的進步。其中減速機是最為核心的關鍵技術,減速機中應用最為廣泛的有諧波減速機和 RV 減速機。其中諧波減速機具有傳動速比大、傳動精度高等優點,但是容易產生交變應力,造成疲勞破環,散熱條件差。RV 扭矩大、承受過載能力高、傳動效率高,較為廣泛的應用在機械臂中。
1.硬件組成
1.1 硬件系統組成
使用 PLC 作為核心控制器,PLC 通過編寫的程序控制變頻器實現交流電機的多端速運行,交流電機的輸出轉速可以通過模擬量模塊進行實時的檢測監控,張力控制器通過控制電流的大小調整磁粉的輸出實現模擬負載的效果。同時試驗臺系統中的所有變量都可以通過人機界面進行監控、調整。
1.2 系統硬件的選擇
1.2.1 PLC
PLC 的選擇主要要考慮機型、容量、I/O 模塊、電源模塊、特殊功能模塊。
本文試驗臺,所需要輸出點 5,輸入點用觸摸屏仿真處理所以輸入點不做要求,同時需要需用 4 通道的模擬量模塊監控交流電機的轉速。綜上分析 PLC 控制器選用西門子 S7- 200 系列 CPU- 22(AC/DC/RLY)。
1.2.2 人機界面
選用昆侖通泰的 MCGS 觸摸屏來作為試驗臺的人機交互界面。利用觸摸屏來控制系統的啟動、停止、多端速的選擇、轉速曲線監控、報警數據的存儲等功能。使操作更加的方便,并節省 PLC 的輸入點的應用。
2.控制系統組成
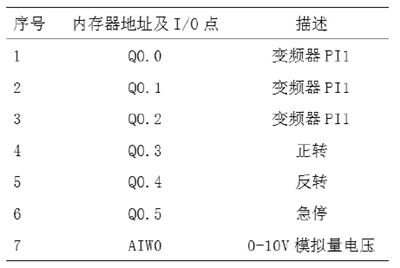
2.1 PLC 內部寄存器分配及 I/ O 分布表
表 1 系統控制 I/ O 分布表
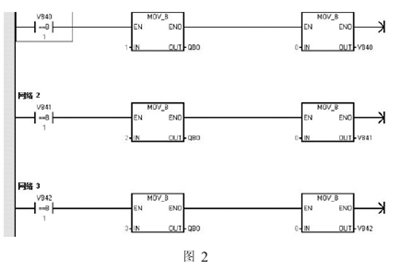
2.2 PLC 程序設計
1)將變頻器的模擬量信號采集到 PLC,應用 EM232 的模擬量借口采集到模擬量信號存儲到 AIW0 存儲器。
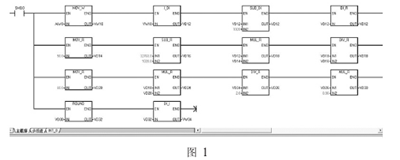
2)多段速調速方法。通過控制 Q0.0 Q0.1 Q0.2 三個輸出端子的通斷狀態,實現變頻器的 7 段調速。
3.系統調試
操作界面主要由:數據顯示、實時報警、實時曲線、數據報表、參數設定、密碼設置等界面組成。實時曲線畫面可以實時的反饋電機轉速的信息,觀察電機的速度曲線,如圖 3 所示。
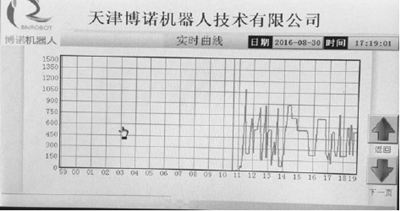
圖 3 電機實時轉速監控
4.實踐與經驗
本試驗臺中應用廉價的交流電機替代了昂貴的伺服電機,應用PLC 控制器替代了工業機器人的核心控制器,利用張力控制器模擬負載,真實的模擬了機械臂工作情況。為檢測 RV 減速機的生產質量以及研究 RV 減速的工作性能提供了有力的輔助工具。
投稿箱:
如果您有機床行業、企業相關新聞稿件發表,或進行資訊合作,歡迎聯系本網編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機床行業、企業相關新聞稿件發表,或進行資訊合作,歡迎聯系本網編輯部, 郵箱:skjcsc@vip.sina.com
更多相關信息

